Building information modeling in near-real-time by range cameras: analysis of the structure sensor potentialities
Keywords:
Building Information Modeling, Range camera, Structure Sensor, real-timeAbstract
This work investigates the potentialities of a low-cost structured light range camera, the Occipital Structure Sensor, for the
construction of a Building Information Modeling (BIM) in (near) real-time, with the specific aim of evaluating its accuracy in
surveying indoor environments.
Range cameras are active imaging sensors, low-cost and easy to use, able to natively measure the distances of several points at high
frame rate (30 - 60 Hz) and therefore they can be used as 3D scanners to easily collect dense point clouds practically in real-time.
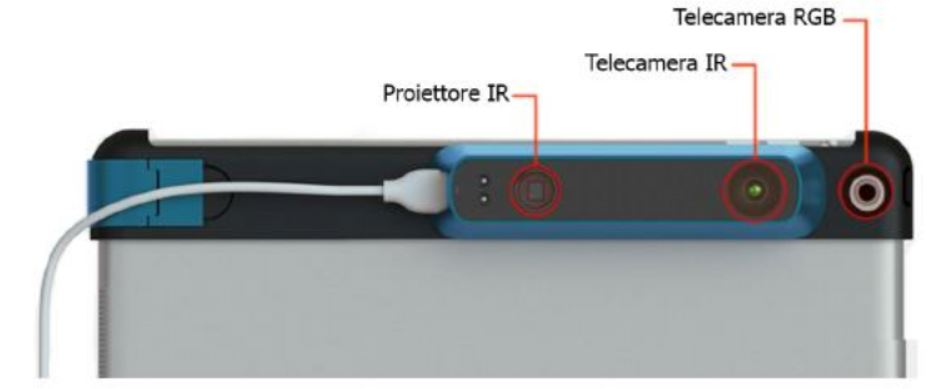
The Structure Sensor is precisely the first range camera specifically designed for mobile devices.
The Room Capture application, provided within the Structure SDK by Occipital itself, has been thus used to acquire in real-time the
3D models of three indoor environments, characterized by different shapes and dimensions. For every room, several 3D models have
been captured and for each model a horizontal section has been cut in proximity of the ceiling, in order to extract the corresponding
2D map net of floor-level objects and to uniquely measure the principal quantities (sides, perimeter and area) of the scanned
environments. These quantities have been compared with those obtained through a traditional architectural survey, performed by
means of a measuring tape.
The achieved results show that it is effectively possible to use the Structure Sensor to reconstruct 3D models of indoor environments
and to generate the corresponding planimetric maps in (near) real-time. In fact, the reconstructed planimetric layouts present a mean
accuracy of 5 cm, suitable for 2D maps at scale 1:200.
Downloads
Downloads
Published
How to Cite
Issue
Section
License

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.